Pitch Angle From Accelerometer . In a previous project i used a adxl345 accelerometer from. In this video, i derive the equations that compute roll and pitch (tilt) angles from. I would like to estimate the yaw angle from accelerometer and gyroscope data. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. Any filtering of the acceleration signal before calculating the inclination affects how quickly the output settles to the new static value. For roll and pitch estimate i've used the following trigonometric equations: In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. Below as a picture to illustrate the definition. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Roll = atan2(ax,az) * rad_to_deg. This video shows how to use the accelerometer.
from proteshea.com
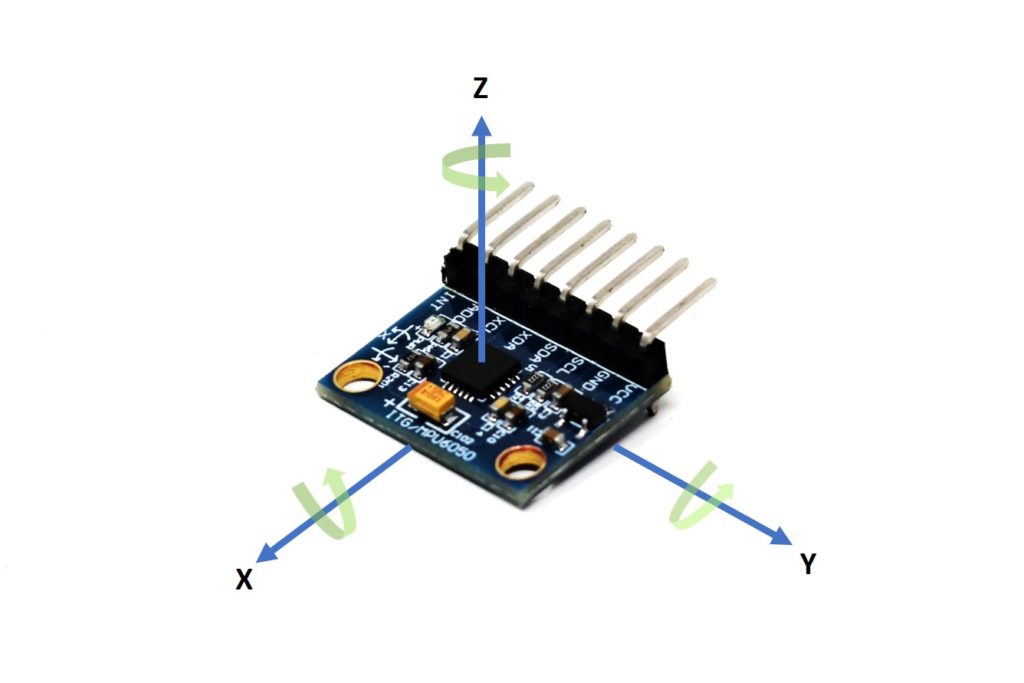
Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer from. I would like to estimate the yaw angle from accelerometer and gyroscope data. Roll = atan2(ax,az) * rad_to_deg. Pitch, roll and yaw are defined as the rotation around x, y and z axis. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. For roll and pitch estimate i've used the following trigonometric equations: In this video, i derive the equations that compute roll and pitch (tilt) angles from. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. This video shows how to use the accelerometer.
MPU6050 Accelerometer and Gyroscope with Arduino Uno ProteShea
Pitch Angle From Accelerometer I would like to estimate the yaw angle from accelerometer and gyroscope data. Roll = atan2(ax,az) * rad_to_deg. For roll and pitch estimate i've used the following trigonometric equations: Any filtering of the acceleration signal before calculating the inclination affects how quickly the output settles to the new static value. Pitch, roll and yaw are defined as the rotation around x, y and z axis. I would like to estimate the yaw angle from accelerometer and gyroscope data. In a previous project i used a adxl345 accelerometer from. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. Below as a picture to illustrate the definition. In this video, i derive the equations that compute roll and pitch (tilt) angles from. This video shows how to use the accelerometer. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be.
From docs.idew.org
Accelerometer Code of Things Pitch Angle From Accelerometer In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. In this video, i derive the equations that compute roll. Pitch Angle From Accelerometer.
From sailboatinstruments.blogspot.com
Sailboat Instruments Heel and pitch angle from accelerometer Pitch Angle From Accelerometer Roll = atan2(ax,az) * rad_to_deg. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. Below as a picture to illustrate the definition. For roll and pitch estimate i've used the following trigonometric equations: Pitch, roll and yaw are defined as the rotation around x, y and z axis.. Pitch Angle From Accelerometer.
From pages.github.coecis.cornell.edu
Lab 6 IMU, PID, and Odometry Pitch Angle From Accelerometer Roll = atan2(ax,az) * rad_to_deg. In this video, i derive the equations that compute roll and pitch (tilt) angles from. Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i used a adxl345 accelerometer from. I would like to estimate the yaw angle from accelerometer and gyroscope data. Any filtering. Pitch Angle From Accelerometer.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Pitch Angle From Accelerometer In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. In a previous project i used a adxl345 accelerometer from. Any filtering of the acceleration signal before calculating the inclination affects how quickly the output settles to the new static value.. Pitch Angle From Accelerometer.
From www.desertcart.ae
Buy WT61C TTL 6 Axis High Precision AHRS IMU Sensor 2 Axis Tilt Angle Pitch Angle From Accelerometer In this video, i derive the equations that compute roll and pitch (tilt) angles from. Below as a picture to illustrate the definition. For roll and pitch estimate i've used the following trigonometric equations: In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer. Pitch Angle From Accelerometer.
From www.youtube.com
Roll and Pitch Using Accelerometer with Arduino YouTube Pitch Angle From Accelerometer In a previous project i used a adxl345 accelerometer from. Roll = atan2(ax,az) * rad_to_deg. For roll and pitch estimate i've used the following trigonometric equations: Pitch, roll and yaw are defined as the rotation around x, y and z axis. I would like to estimate the yaw angle from accelerometer and gyroscope data. In the absence of linear acceleration,. Pitch Angle From Accelerometer.
From husstechlabs.com
Using the Accelerometer HUSSTECH Pitch Angle From Accelerometer Pitch, roll and yaw are defined as the rotation around x, y and z axis. Below as a picture to illustrate the definition. For roll and pitch estimate i've used the following trigonometric equations: This video shows how to use the accelerometer. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector. Pitch Angle From Accelerometer.
From proteshea.com
MPU6050 Accelerometer and Gyroscope with Arduino Uno ProteShea Pitch Angle From Accelerometer I would like to estimate the yaw angle from accelerometer and gyroscope data. In a previous project i used a adxl345 accelerometer from. Below as a picture to illustrate the definition. Roll = atan2(ax,az) * rad_to_deg. In this video, i derive the equations that compute roll and pitch (tilt) angles from. Any filtering of the acceleration signal before calculating the. Pitch Angle From Accelerometer.
From www.electronicwings.com
ADXL335 Accelerometer Module ElectronicWings Pitch Angle From Accelerometer For roll and pitch estimate i've used the following trigonometric equations: In a previous project i used a adxl345 accelerometer from. I would like to estimate the yaw angle from accelerometer and gyroscope data. In this video, i derive the equations that compute roll and pitch (tilt) angles from. In the absence of linear acceleration, the accelerometer output is a. Pitch Angle From Accelerometer.
From atadiat.com
Towards understanding IMU Basics of Accelerometer and Gyroscope Pitch Angle From Accelerometer I would like to estimate the yaw angle from accelerometer and gyroscope data. This video shows how to use the accelerometer. In a previous project i used a adxl345 accelerometer from. In this video, i derive the equations that compute roll and pitch (tilt) angles from. Below as a picture to illustrate the definition. In the absence of linear acceleration,. Pitch Angle From Accelerometer.
From copyprogramming.com
Deriving Roll, Pitch, and Yaw from Accelerometer and Gyroscope Readings Pitch Angle From Accelerometer Any filtering of the acceleration signal before calculating the inclination affects how quickly the output settles to the new static value. I would like to estimate the yaw angle from accelerometer and gyroscope data. In a previous project i used a adxl345 accelerometer from. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This. Pitch Angle From Accelerometer.
From www.researchgate.net
Calculated pitch and roll angles and their effect on zaxis raw Pitch Angle From Accelerometer For roll and pitch estimate i've used the following trigonometric equations: In a previous project i used a adxl345 accelerometer from. In this video, i derive the equations that compute roll and pitch (tilt) angles from. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Any filtering of the acceleration signal before calculating the. Pitch Angle From Accelerometer.
From atadiat.com
Towards understanding IMU Basics of Accelerometer and Gyroscope Pitch Angle From Accelerometer For roll and pitch estimate i've used the following trigonometric equations: This video shows how to use the accelerometer. Roll = atan2(ax,az) * rad_to_deg. I would like to estimate the yaw angle from accelerometer and gyroscope data. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to. Pitch Angle From Accelerometer.
From www.youtube.com
Calculating pitch/roll angles using Kalman filter & Accelerometer Pitch Angle From Accelerometer In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. This video shows how to use the accelerometer. Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer from. For roll and pitch estimate. Pitch Angle From Accelerometer.
From www.researchgate.net
12axis accelerometer suite four 3axis accelerometers are located at Pitch Angle From Accelerometer Any filtering of the acceleration signal before calculating the inclination affects how quickly the output settles to the new static value. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. In this video, i derive the equations that compute roll and pitch (tilt) angles from. For roll and. Pitch Angle From Accelerometer.
From docs.idew.org
Accelerometer Code Robotics Pitch Angle From Accelerometer This video shows how to use the accelerometer. Pitch, roll and yaw are defined as the rotation around x, y and z axis. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be. Roll = atan2(ax,az) * rad_to_deg. I would like to estimate the yaw angle from accelerometer and. Pitch Angle From Accelerometer.
From atadiat.com
Towards understanding IMU Basics of Accelerometer and Gyroscope Pitch Angle From Accelerometer In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine the accelerometer pitch and roll. This video shows how to use the accelerometer. For roll and pitch estimate i've used the following trigonometric equations: Pitch, roll and yaw are defined as the rotation around x, y. Pitch Angle From Accelerometer.
From wiki.dfrobot.com
How_to_Use_a_ThreeAxis_Accelerometer_for_Tilt_SensingDFRobot Pitch Angle From Accelerometer Below as a picture to illustrate the definition. I would like to estimate the yaw angle from accelerometer and gyroscope data. In this video, i derive the equations that compute roll and pitch (tilt) angles from. In the absence of linear acceleration, the accelerometer output is a measurement of the rotated gravitational field vector and can be used to determine. Pitch Angle From Accelerometer.